ddd
Content
常用坐标系及其变换
- 苏制坐标系&英制坐标系
- 坐标系变换
ddd
苏制坐标系&英制坐标系
苏式坐标系
苏式坐标系主要有地面坐标系、弹(机)体坐标系、弹道坐标系与速度坐标系。
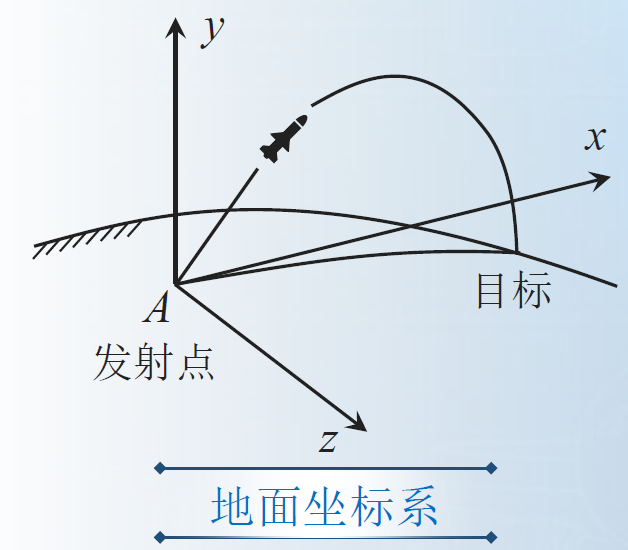
原点
:通常为发射点(发射瞬时飞行器的质心) 轴:通常为原点与目标之间的地球大圆切线,指向目标为正。 轴:垂直于 轴,向上为正。 轴:垂直 平面,按右手坐标系确定正方向
特点:固连于地球表面,随地球一起转动。 近似:研究近程飞行力学问题时,可忽略地球的自转和公转,将地球表面看作平面,认为重力与
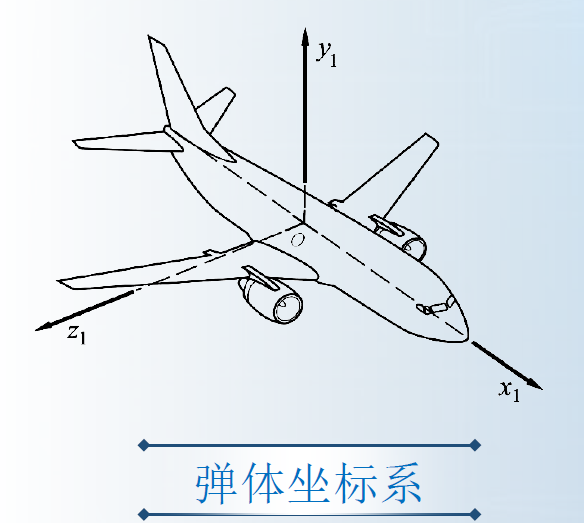
原点
:取在飞行器的质心上。 轴:与飞行器的纵轴重合,指向飞行器的头部为正。 轴:(立轴)位于飞行器的纵向对称面内,垂直于Ox1轴,向上为正。 轴:垂直于 平面,按右手坐标系确定正方向。
与弹体固连,相对于弹体不动,是动坐标。
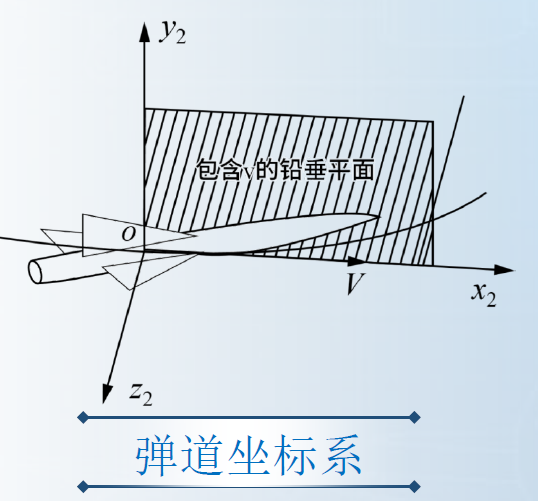
原点O:取在飞行器的质心上。
轴:与飞行器的速度矢量V重合。 轴:位于包含速度矢量V的铅垂面内,垂直于Ox2轴,向上为正。 轴:垂直于 平面,按右手坐标系确定正方向。
特点:与飞行器的速度矢量固连,是动坐标系。 用途:将飞行器质心移动的动力学方程投影到该坐标系上,形式简单,含义清晰。
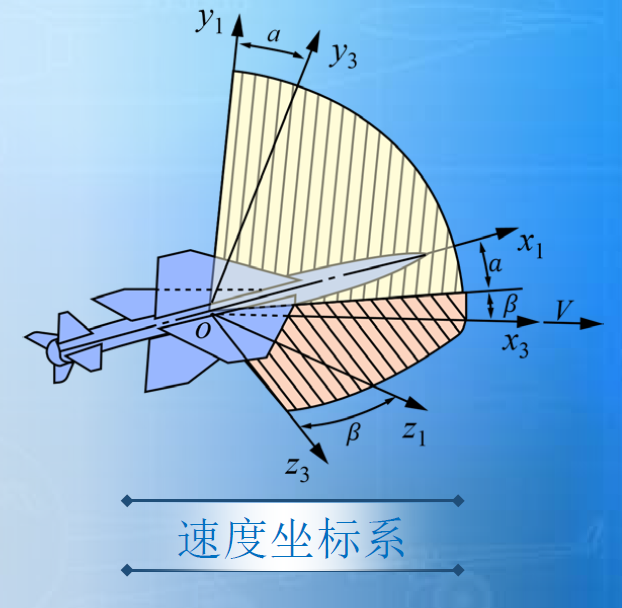
原点
:取在飞行器的质心上。 轴:与飞行器的速度矢量V重合。 轴:位于飞行器纵向对称面内,垂直于$x_3轴,向上为正。 轴:垂直于 平面,按右手坐标系确定正方向。
特点:与飞行器速度矢量固连,是动坐标系。 用途:用于确定飞行器相对于气流的角度;空气动力沿该坐标系三轴的投影分别定义为阻力、升力和侧向力。
英制坐标系
常用坐标系之间的联系
Remainder:此处采用苏制坐标系定义。
地面&弹体坐标系

俯仰角 Pitch (
):飞行器纵轴( )与水平面( )之间的夹角。飞行器纵轴指向水平面上方则为正,反之为负。 偏航角 Yaw (
):飞行器纵轴在水平面的投影与地面坐标系 轴之间的夹角。沿 轴俯视,若由 轴逆时针旋转而成则为正,反之为负。 倾斜角 Roll (
):弹体坐标系的 轴与包含飞行器纵轴的铅垂面之间的夹角。由飞行器尾部顺纵轴前视,若 轴位于铅垂面右侧,则 为正。
地面&弹道坐标系

弹道倾角 (
):飞行器速度矢量与水平面 之间的夹角。速度矢量指向水平面上方, 为正,反之为负。 弹道偏角 (
):飞行器速度矢量在水平面的投影与地面坐标系 轴之间的夹角。沿 轴俯视,若 由 轴逆时针旋转而成则为正,反之为负。
速度&弹体坐标系:

- 攻角 (
):飞行器的速度矢量在弹体纵向对称面的投影与Ox1轴之间的夹角。若Ox1轴位于速度投影线的上方,则为正,反之为负。 - 侧滑角 (
):飞行器速度矢量与纵向对称面之间的夹角。沿飞行方向观察,若来流从右侧流向飞行器,则 为正,反之为负。
坐标系变换
主要涉及刚体运动相关内容,通过 旋转矩阵、投影、欧拉角、四元数描述。