Robot Manipulation Text2Motion: From Natural Language Instructions to Feasible Plans (arxiv.org) microsoft/ChatGPT-R...
【Reading】Interactive Gibson Benchmark:A Benchmark for Interactive Navigation in Cluttered Environments
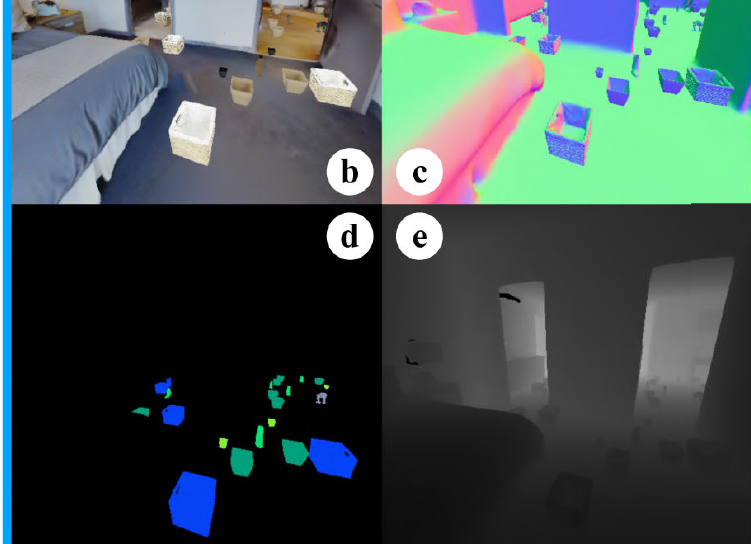
Abstract: This paper presents Interactive Gibson Benchmark, the first comprehensive benchmark for training and evaluating Interactive Navigation solutions. Interactive Navigation tasks are robot navigation problems where physical interaction with objects (e.g., pushing) is allowed and even encouraged to reach the goal.
【Presentation】NeRF-based SLAM
This is the presentation for THU DISCOVER lab.
【Presentation】UAV Planning Based on City Scale NeRF
This the presentation slide for THU DISCOVER lab given on Apr. 28.
【Reading】LATITUDE:Robotic Global Localization with Truncated Dynamic Low-pass Filter in City-scale NeRF
This paper proposes a two-stage localization mechanism in city-scale NeRF.
Reading:"NeRF:Representing Scenes as Neural Radiance Fields for View Synthesis"
This is a summary for paper "NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis". Keywords: scene representation, view synthesis, image-based rendering, volume rendering, 3D deep learning

An interview with AI
This is a record for an mock interview with LLM. The model I use is Vicuna-13b-v0 loaded in 8 bits.